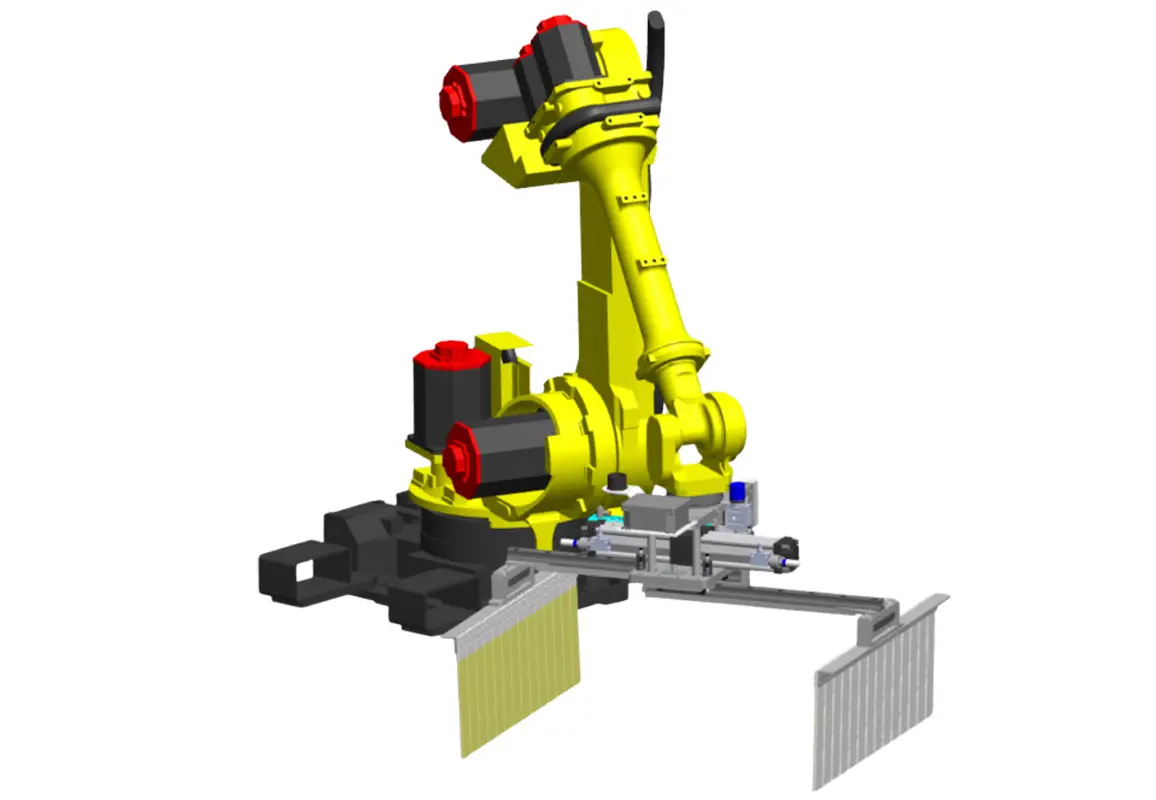
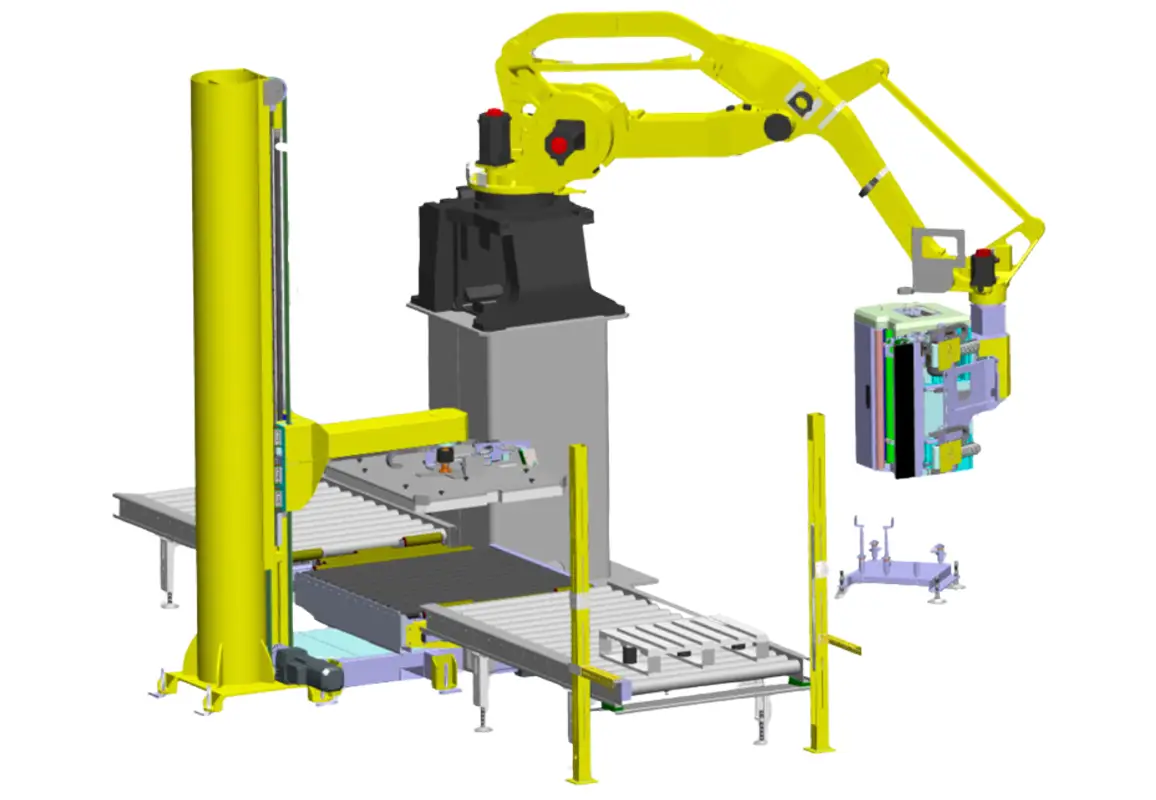
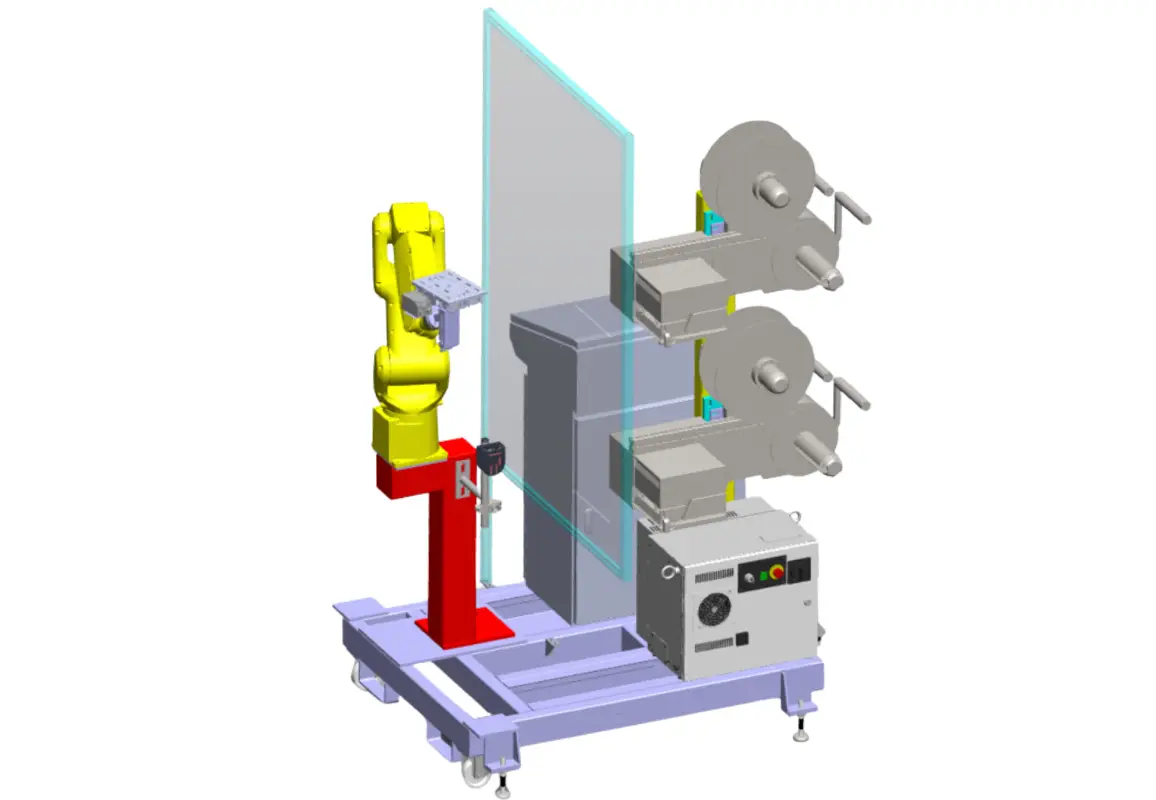
Grazie al design compatto e al robot antropomorfo, la nostra etichettatrice robotizzata consente di applicare etichette su più lati e in diverse posizioni…
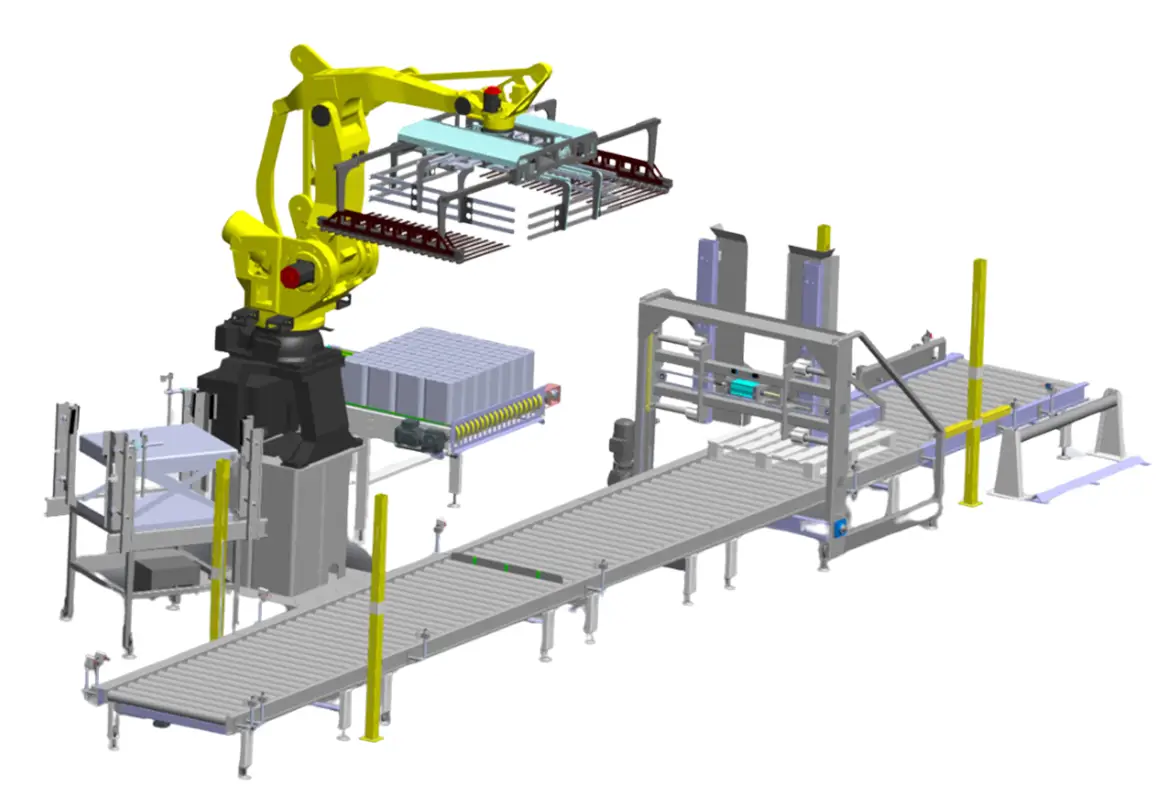
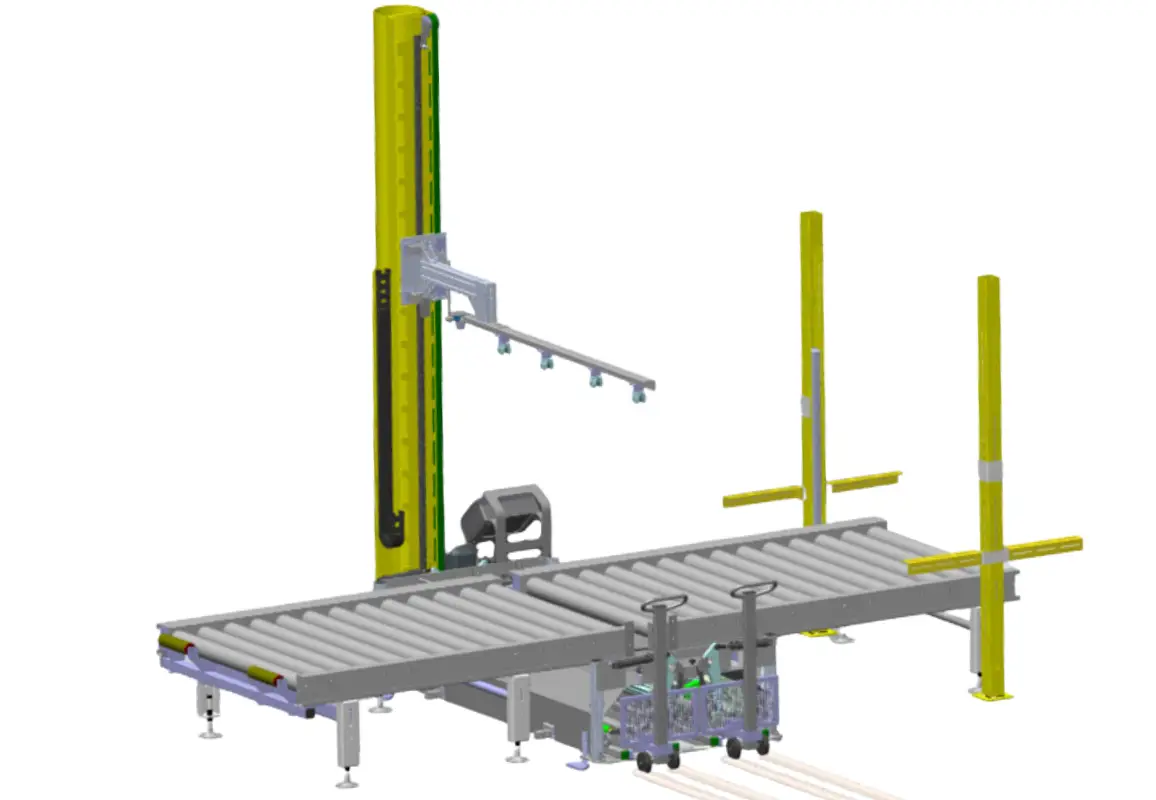
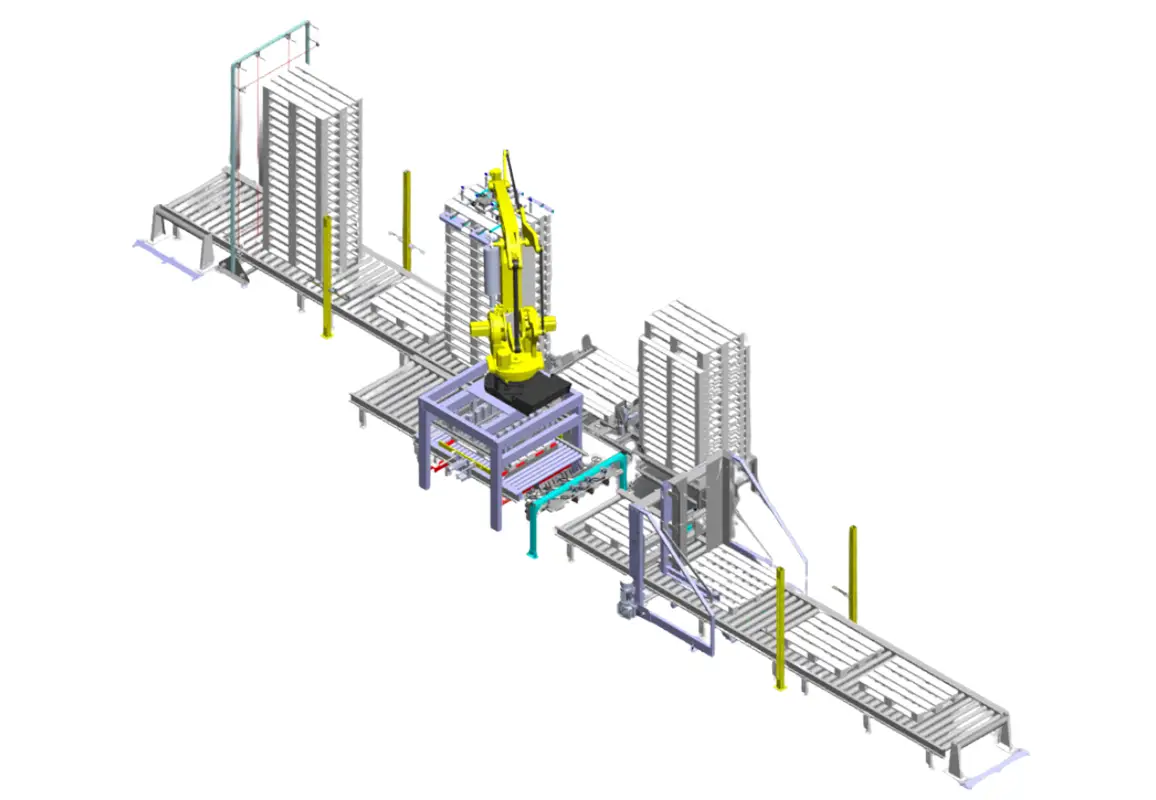
Il sistema automatico di controllo palette garantisce – grazie ad un’accurata selezione preliminare– l’impiego di palette conformi alle esigenze del cliente e l’eliminazione di quelle non conformi…